- Home
- Products
- Knowledge Base
- Sales
- Customer Support
- Contact Us
- Order Desk: 866-216-8700
Welcome to ASD! Call us at 866-216-8700 to place your order today.
How Does a Digital Compass Work? |
|||
|
Friday 23 August, 2013.
|
|||
|
An electronic compass, such as the ones made by Brunton Compasses, uses a patented magnetic sensor technology that was first developed by PNI, Inc. for the U.S. military. This technology is called " magneto-inductive" and is the largest advancement in compass technology since the fulxgate was invented 60 years ago. The magneto-inductive technology is able to electronically sense the difference in the earth's magnetic field from a disturbance caused by external elements such as ferro-magnetic materials and the magnetic field generated by automobile electrical systems. Most digital compasses have an embedded micro controller that subtracts the automobile magnetic field (the distortion) from the stronger earth magnetic fields resulting in a highly accurate compass reading. Compass InstallationThe performance of a compass will greatly depend on its installation location. A compass relies on the earth's magnetic field to provide heading. Any distortions of earth's magnetic field by other sources such as a car massive iron components should be compensated for in order to determine an accurate heading. Sources of magnetic fields in any automobile include permanent magnets mostly in its audio speakers, motors, electric currents flowing in its wiring-either dc or ac, and ferro-magnetic metals such as steel or iron. The influence of these sources of interference on an electronic compass accuracy can be greatly reduced by placing the compass far away from them. Some of the field effects can be compensated by way of calibrating the compass for a defined location in terms of magnetic interference. However, it is not always possible to compensate for time varying magnetic fields; for example, disturbances generated by the motion of magnetic metals, or unpredictable electrical current in a nearby power lines. Magnetic shielding can be used for large field disturbances from motors or audio speakers. The best way to reduce disturbances is distance. Also, never enclose the compass in a magnetically shielded metallic housing. Compass Tilt ErrorsHeading errors due to a tilt depend somewhat on geographic location. At the equator, tilt errors are less critical since the earth's field is strictly in the horizontal plane. This provides larger X and Y readings and little of the Z component correction near the magnetic poles, tilt errors are extremely important, since there is less X,Y field and more of the Z component. Tilt errors are also dependent on the heading. Magnetic Field DistortionsNearby Ferrous materials is another consideration for heading inaccuracy. Since heading is based on the direction of the earth's horizontal field a digital compass must be able to measure this field with lesser influence from other nearby magnetic sources or disturbances.
Magnetic distortions can be categorized as two types—hard iron and soft iron effects. Hard iron distortions arise from permanent magnets and magnetized iron or steel on the compass platform. These distortions will remain constant and in a fixed location relative to the compass for all heading orientations. Hard iron effects add a constant magnitude field component along each axes of the sensor output. This appears as a shift in the origin of the circle equal to the hard iron disturbance in the Xh and Yh axis To compensate for hard iron distortion is usually done by rotating the compass and platform (your car) in a circle and measure enough points on the circle to determine this offset. Once found, the (X,Y) offset can be stored in memory and subtracted from every reading. The net result will be to eliminate the hard iron disturbance from the heading calculation. The soft iron distortion arises from the interaction of the earth’s magnetic field and any magnetically soft material surrounding the compass. Like the hard iron materials, the soft metals also distort the earth’s magnetic field lines. The difference is the amount of distortion from the soft iron depends on the compass orientation. What Is True North?It is well known that the earth's magnetic poles and its axis of rotation are not at the same geographical location. They are about 11.5° rotation from each other. This creates a difference between the true north, or grid north, and the magnetic north, or direction a magnetic compass will point. Simply it is the angular difference between the magnetic and true north expressed as an Easterly or Westerly variation. This difference is defined as the variation angle and is dependent on the compass short duration, making a magnetic compass a useful navigation tool. Compass CalibrationEach calibration method is associated with a specified physical movement of the compass platform in order to sample the magnetic space surrounding the compass. The Hard and Soft iron distortions will vary from location to location within the same platform. The compass has to be mounted permanently to its platform to get a valid calibration. A particular calibration is only valid for that location of the compass. If the compass is re-oriented in the same location, then a new calibration is required. It is possible to use a compass without any calibration if the need is only for repeatability and not accuracy. |
|||
|


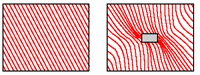 The amount of disturbance depends on the material content of the platform and connectors as well as ferrous objects moving nearby. When a ferrous object is placed in a uniform magnetic field it will create disturbances as shown in this figure. This object could be a steel bolt or bracket near the compass or an iron door latch close to the compass. The net result is a characteristic distortion, or anomaly to the earth’s magnetic field that is unique to the shape of the object.
The amount of disturbance depends on the material content of the platform and connectors as well as ferrous objects moving nearby. When a ferrous object is placed in a uniform magnetic field it will create disturbances as shown in this figure. This object could be a steel bolt or bracket near the compass or an iron door latch close to the compass. The net result is a characteristic distortion, or anomaly to the earth’s magnetic field that is unique to the shape of the object.